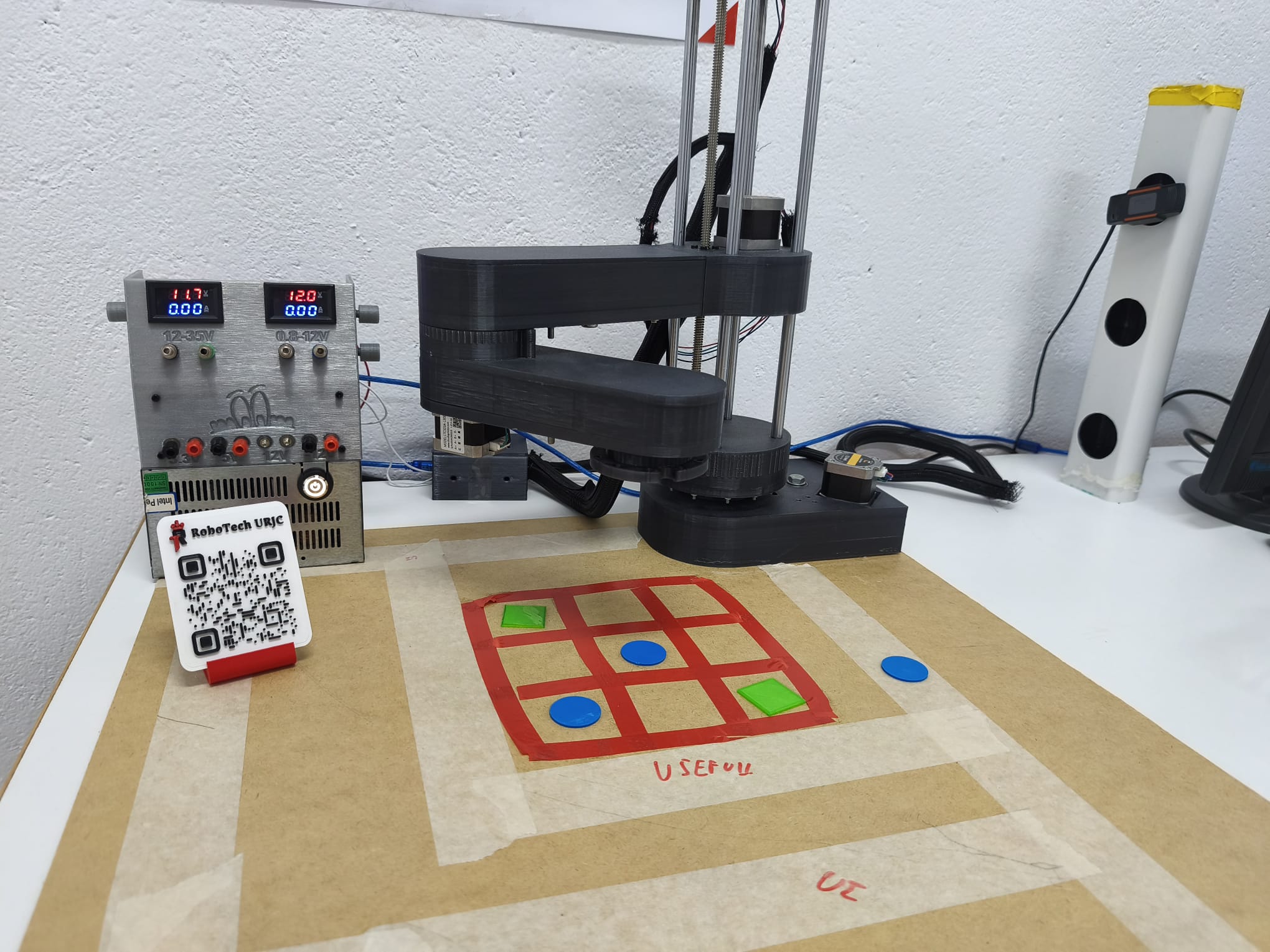
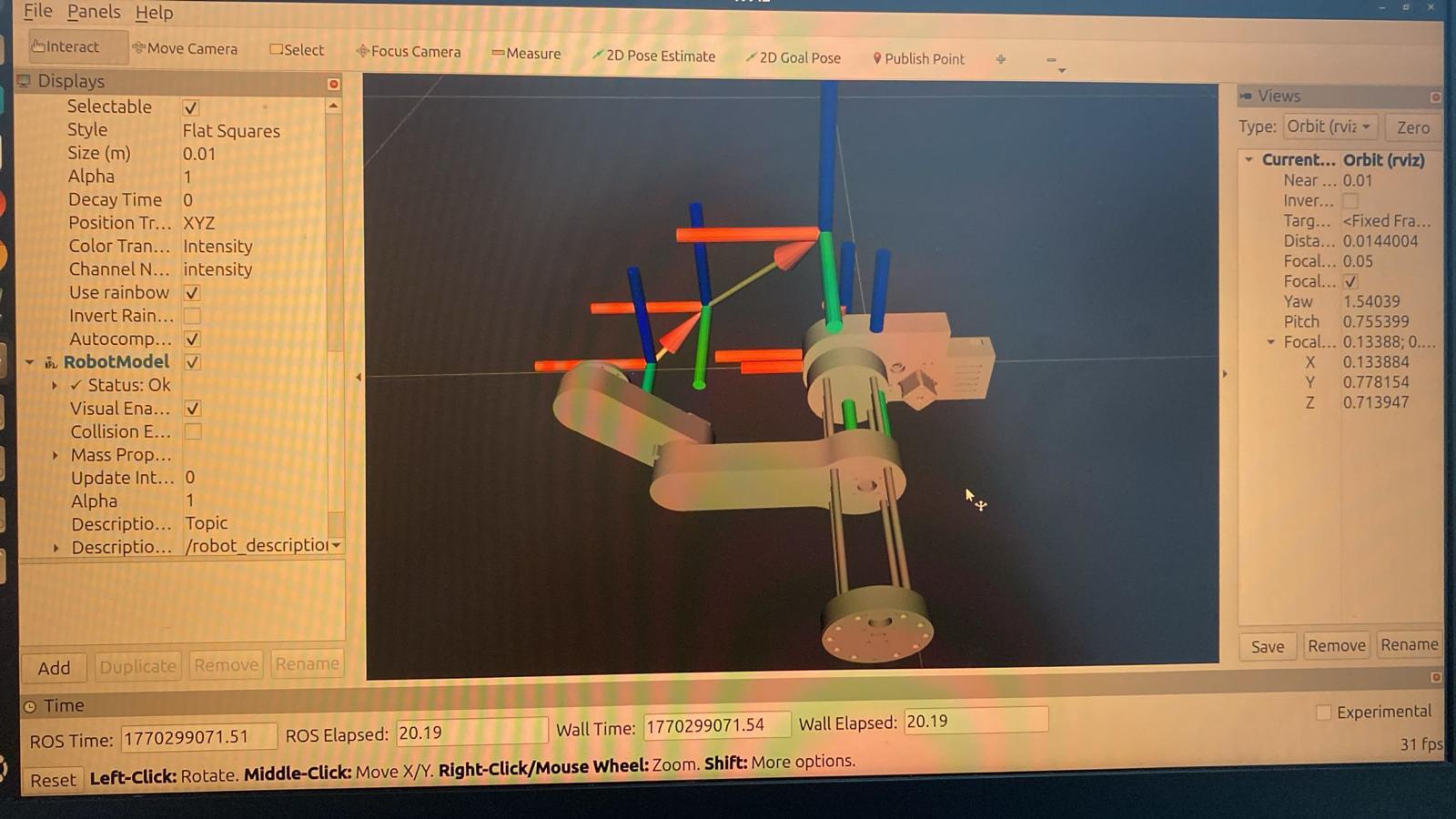
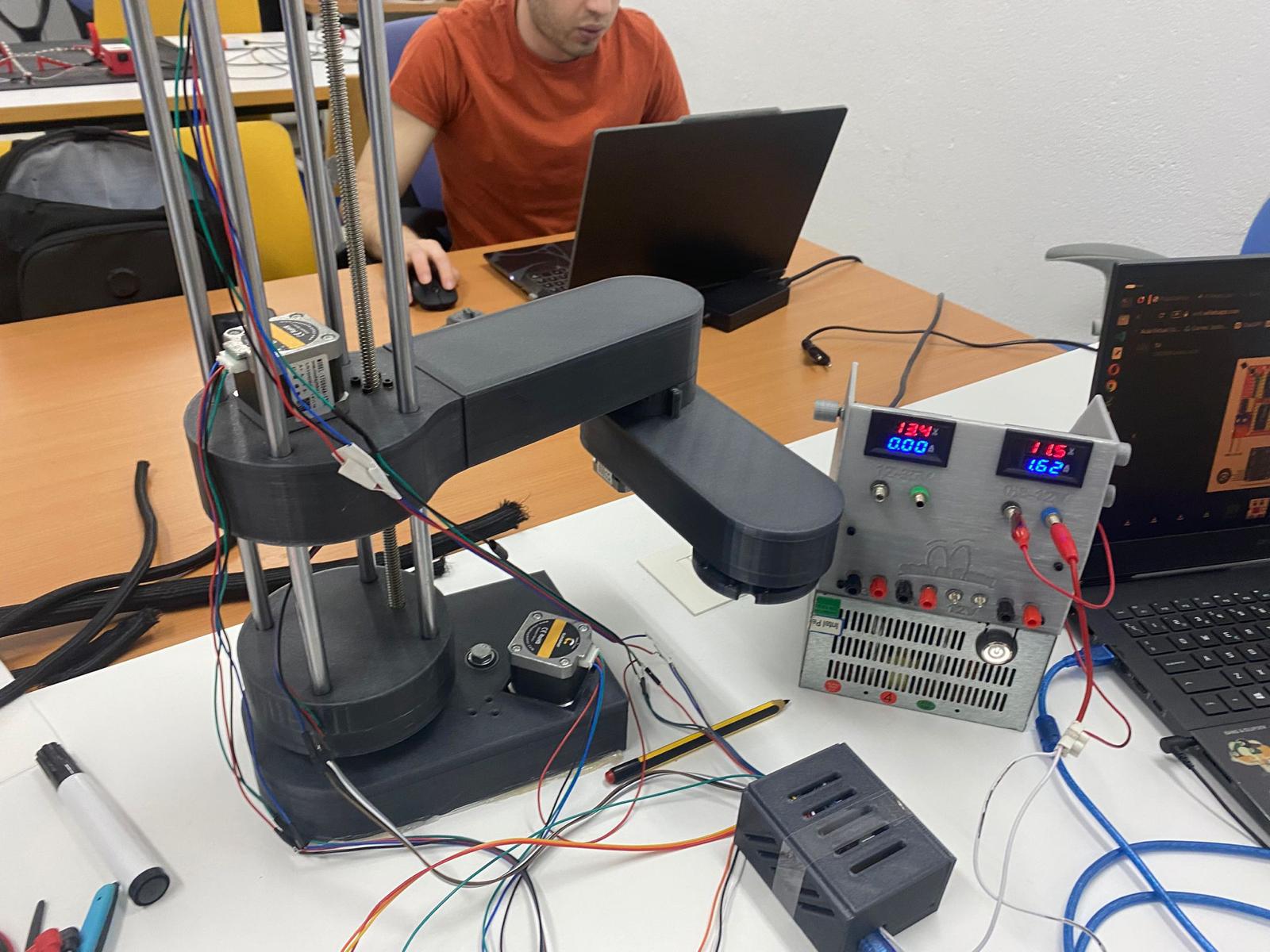
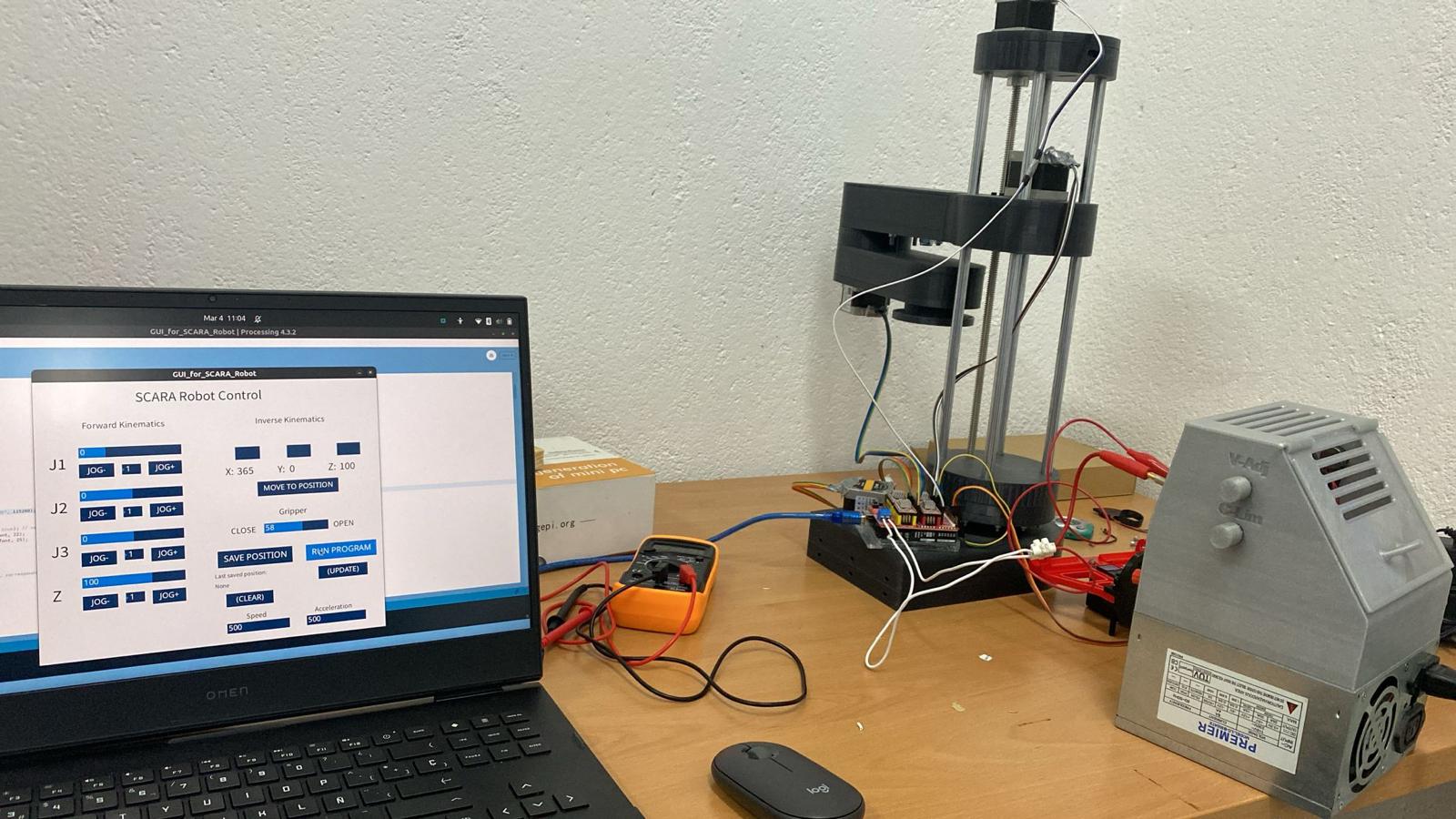
Robot Scara
Brazo robótico para operaciones complejas, manipulación de objetos, repetición de movimientos y experimentos de automatización.
Proyectos
Una vista rápida de lo que está en marcha y de proyectos históricos que siguen sirviendo como referencia para nuevos equipos.
Brazo robótico para operaciones complejas, manipulación de objetos, repetición de movimientos y experimentos de automatización.
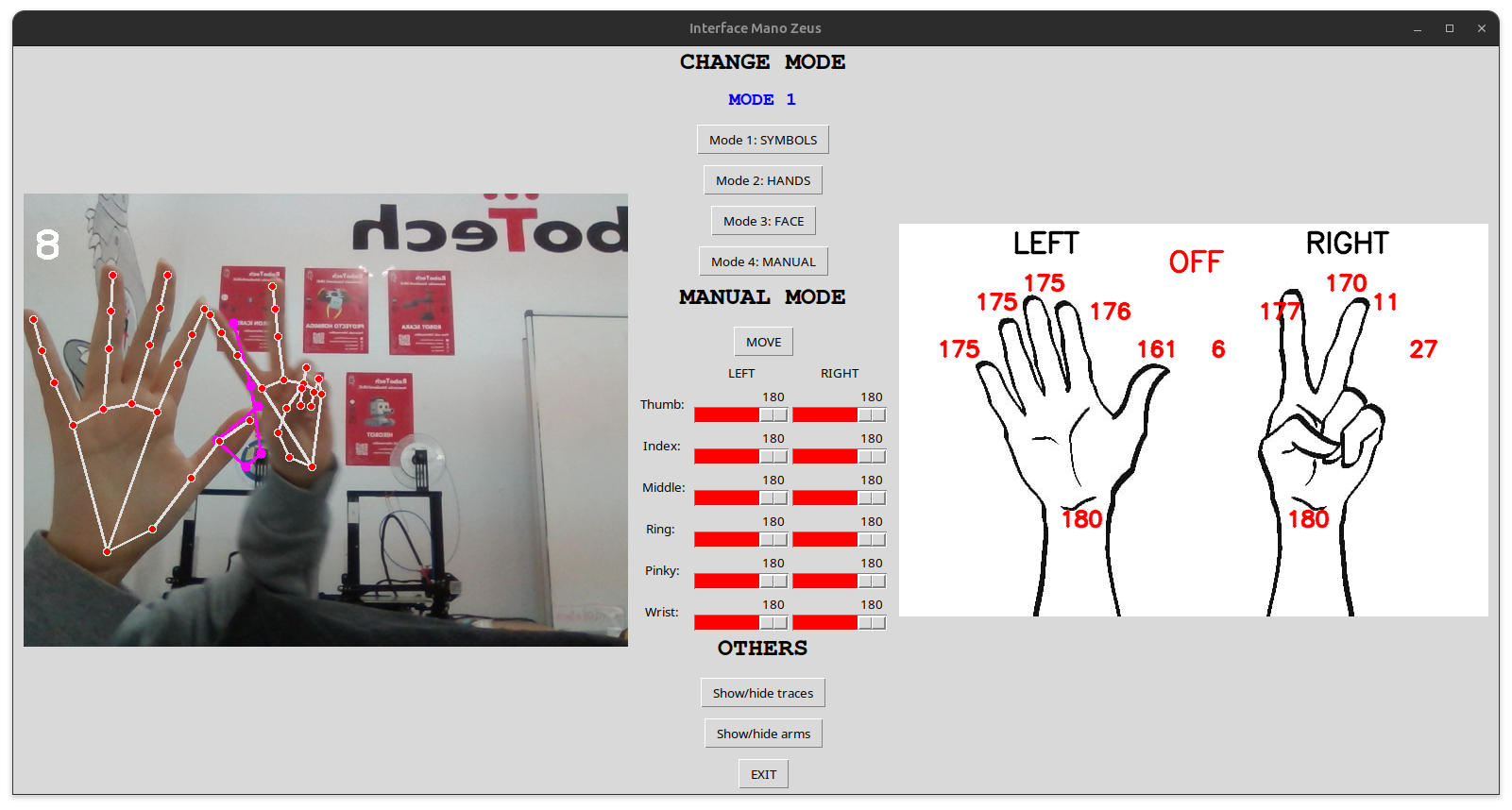
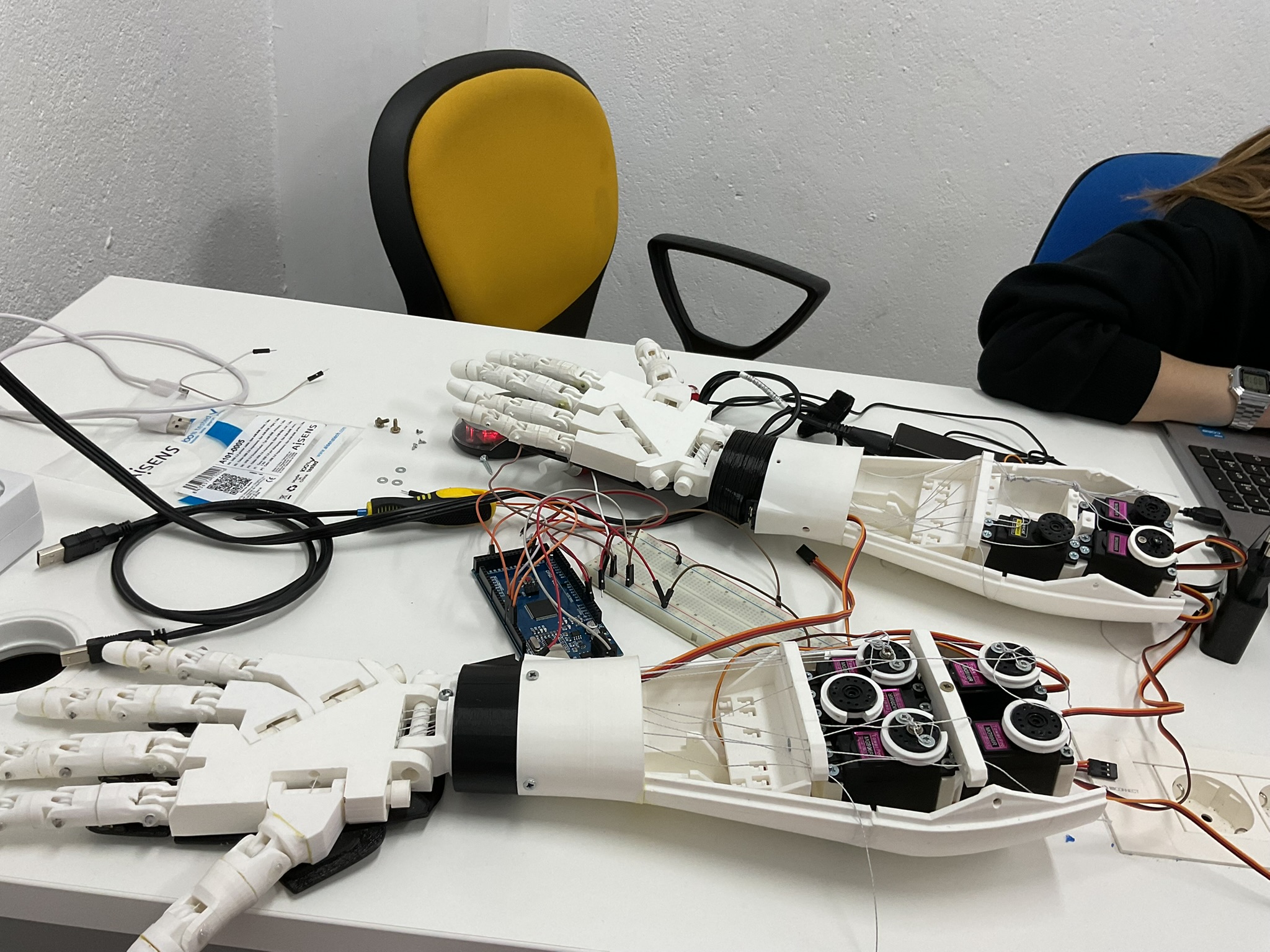
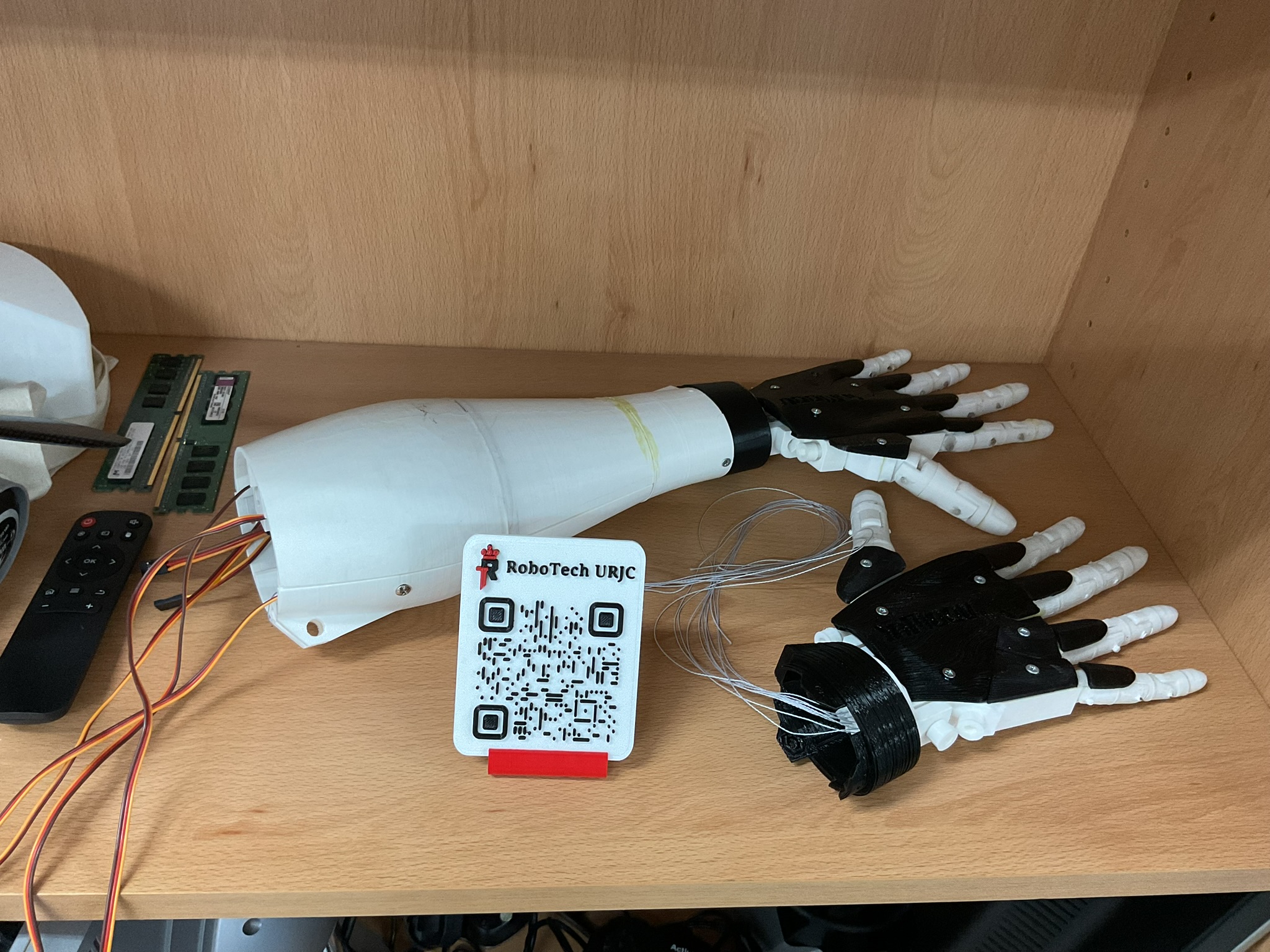
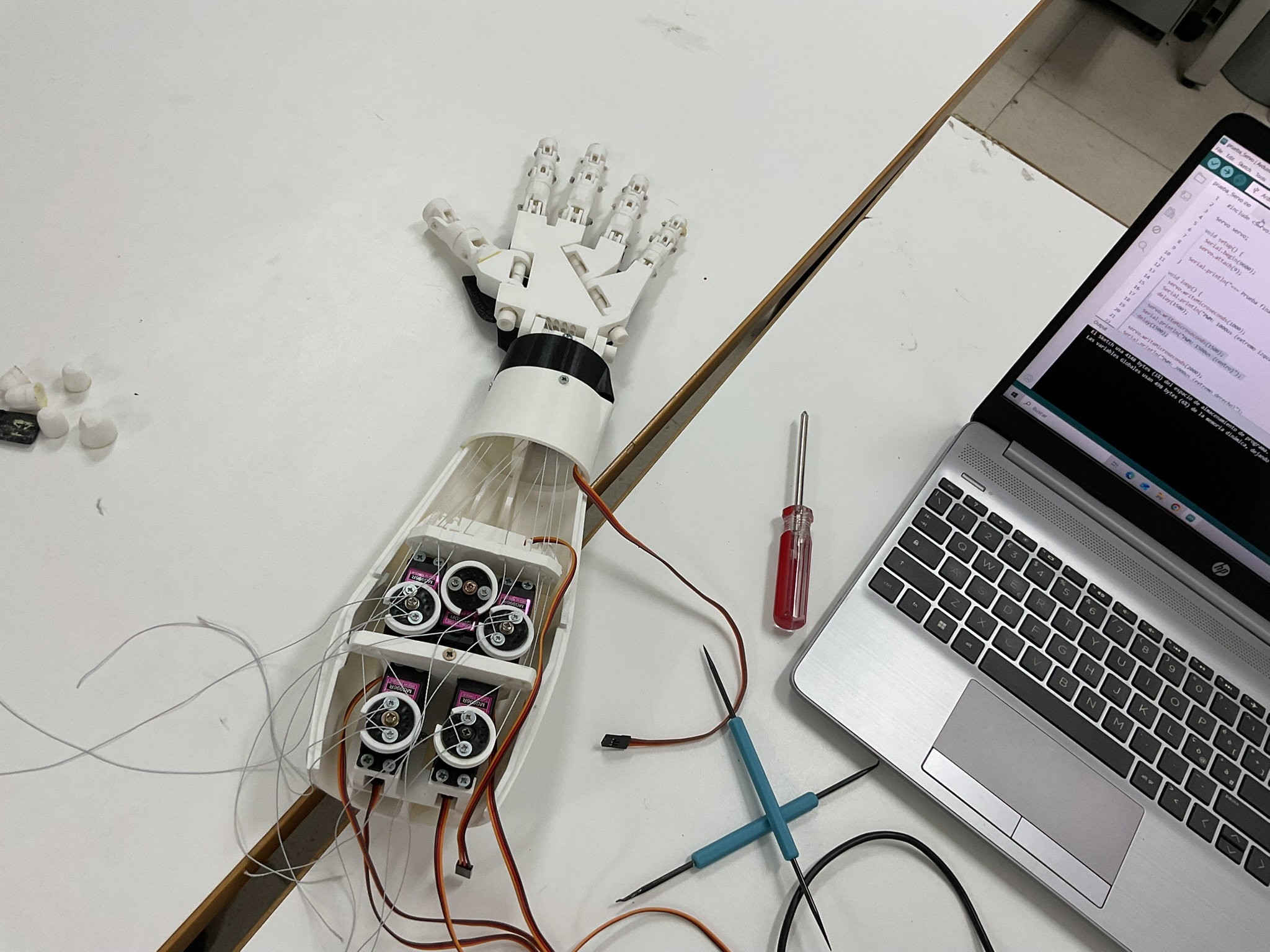
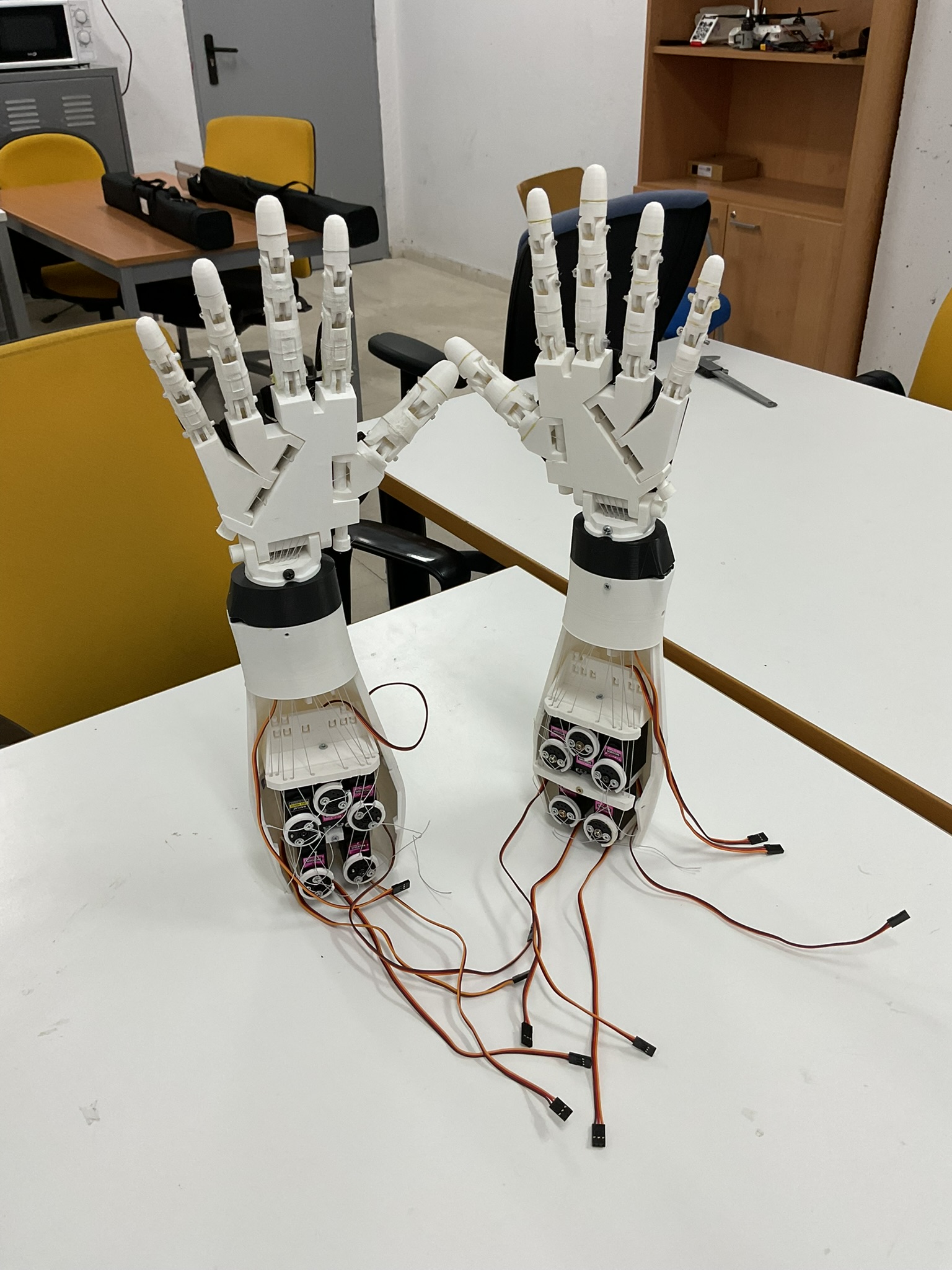
Robot humanoide open-source basado en InMoov. Incluye manos, antebrazos, control con Arduino y visión artificial con Python y OpenCV.
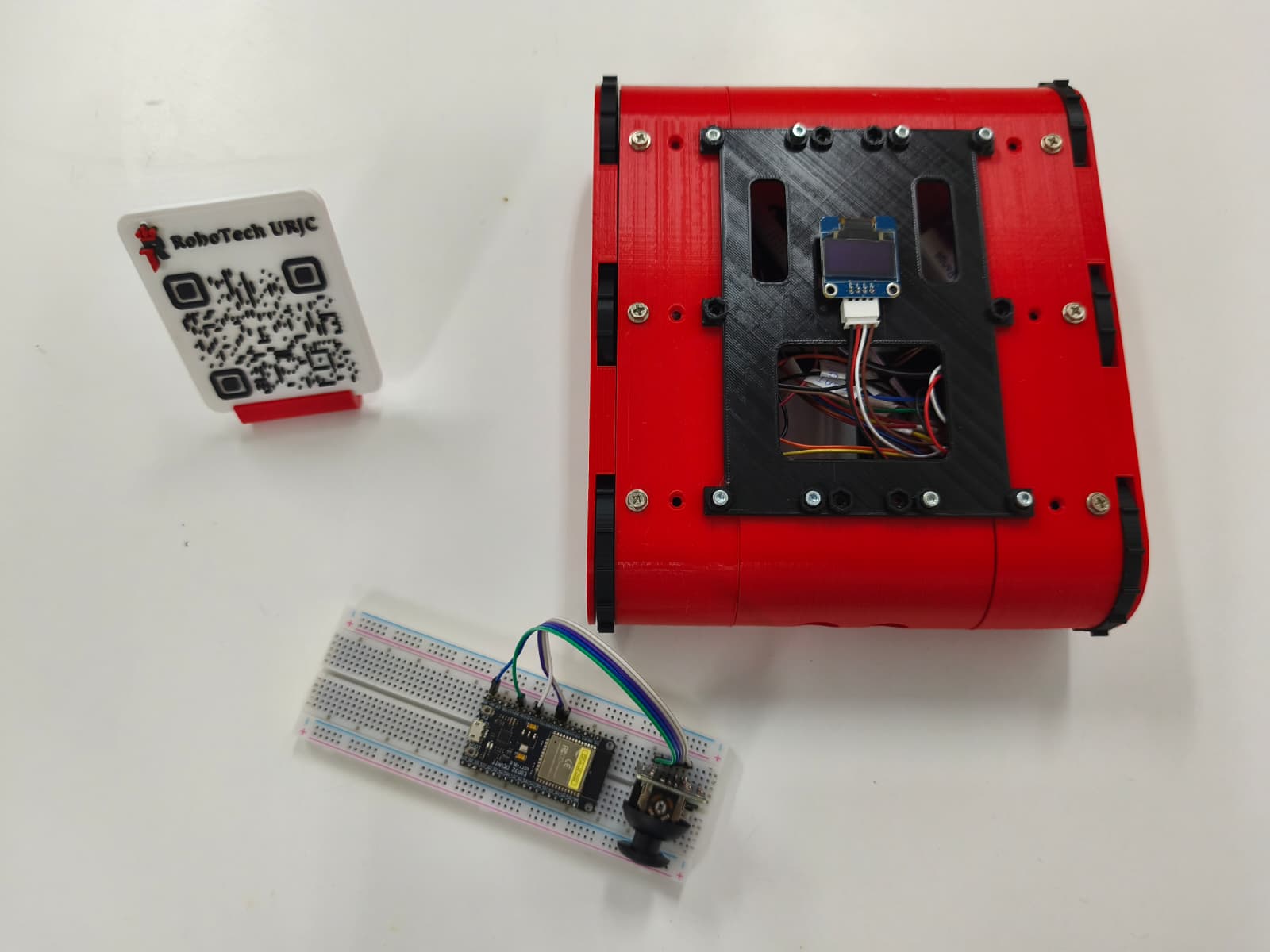
Robot tipo tanque para aprender programación y robótica con sensores, motores, servos y una librería propia para Arduino.
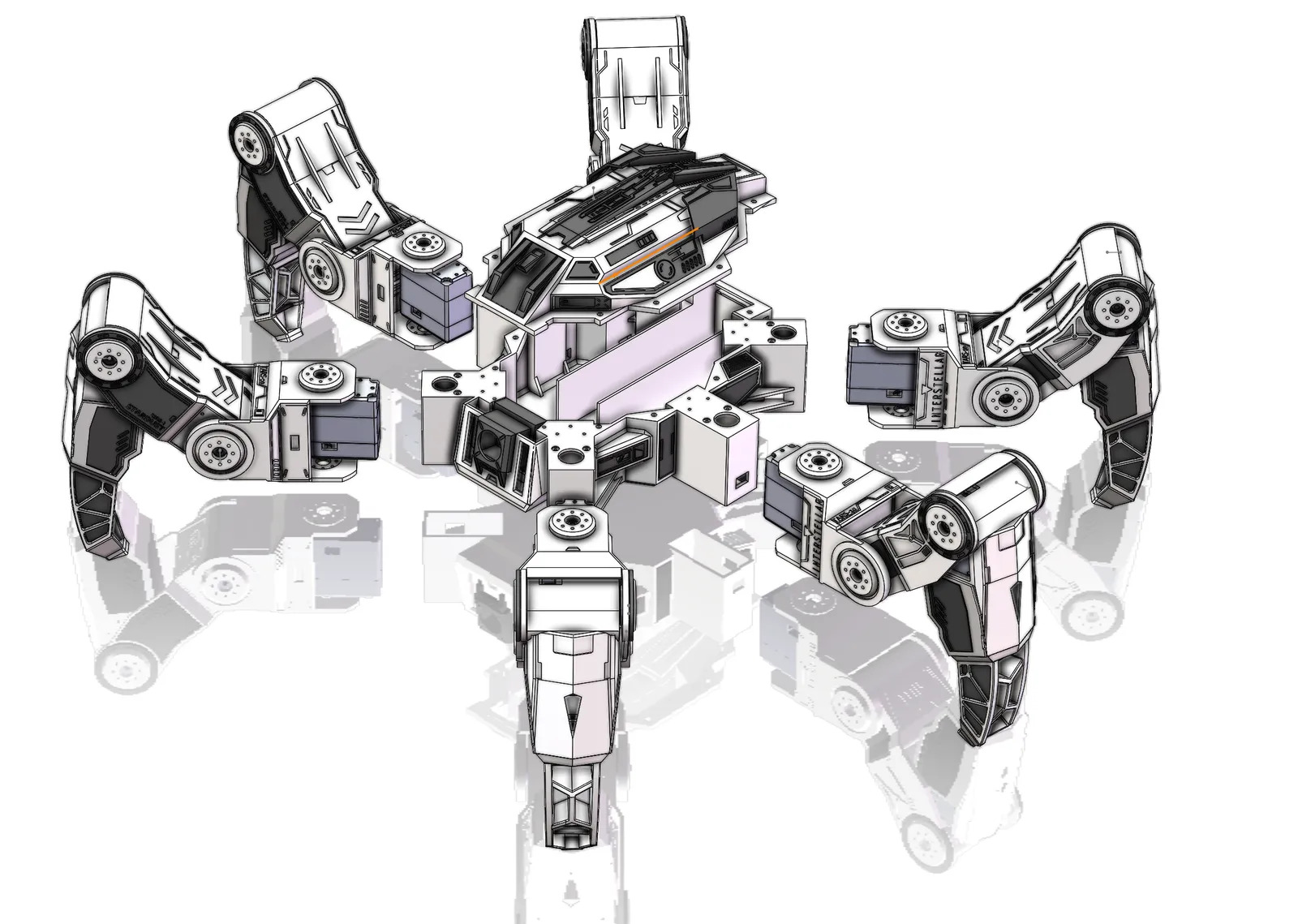
Rediseño del proyecto Hormiga hacia una plataforma hexápoda más modular, robusta y preparada para cinemática inversa y futuras ampliaciones con visión.

Juego electrónico para practicar lógica digital, montaje y programación mediante mecánicas sencillas y componentes accesibles.
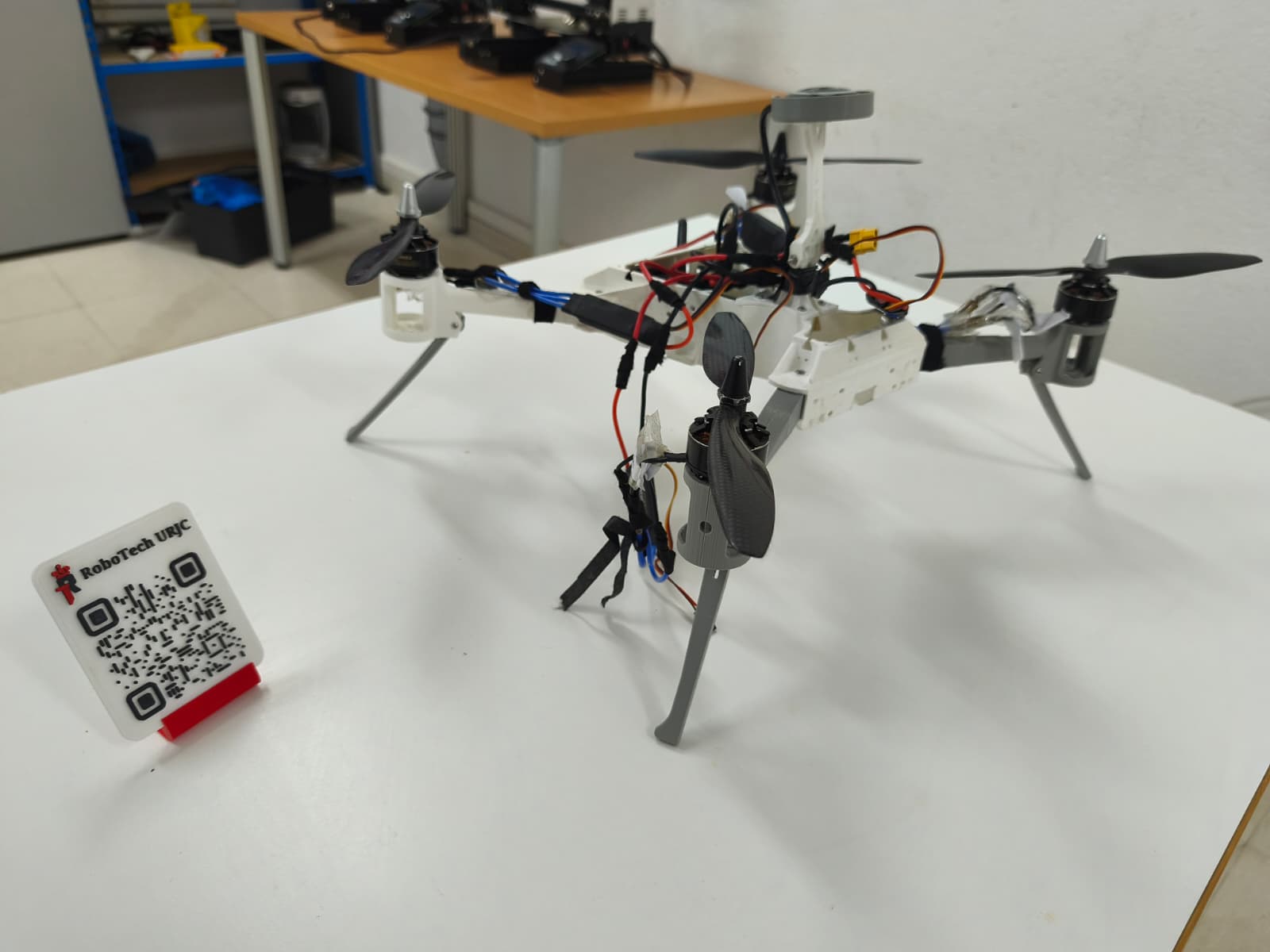
Dron RC de desarrollo modular para control manual, integración con Raspberry Pi y misiones programadas.

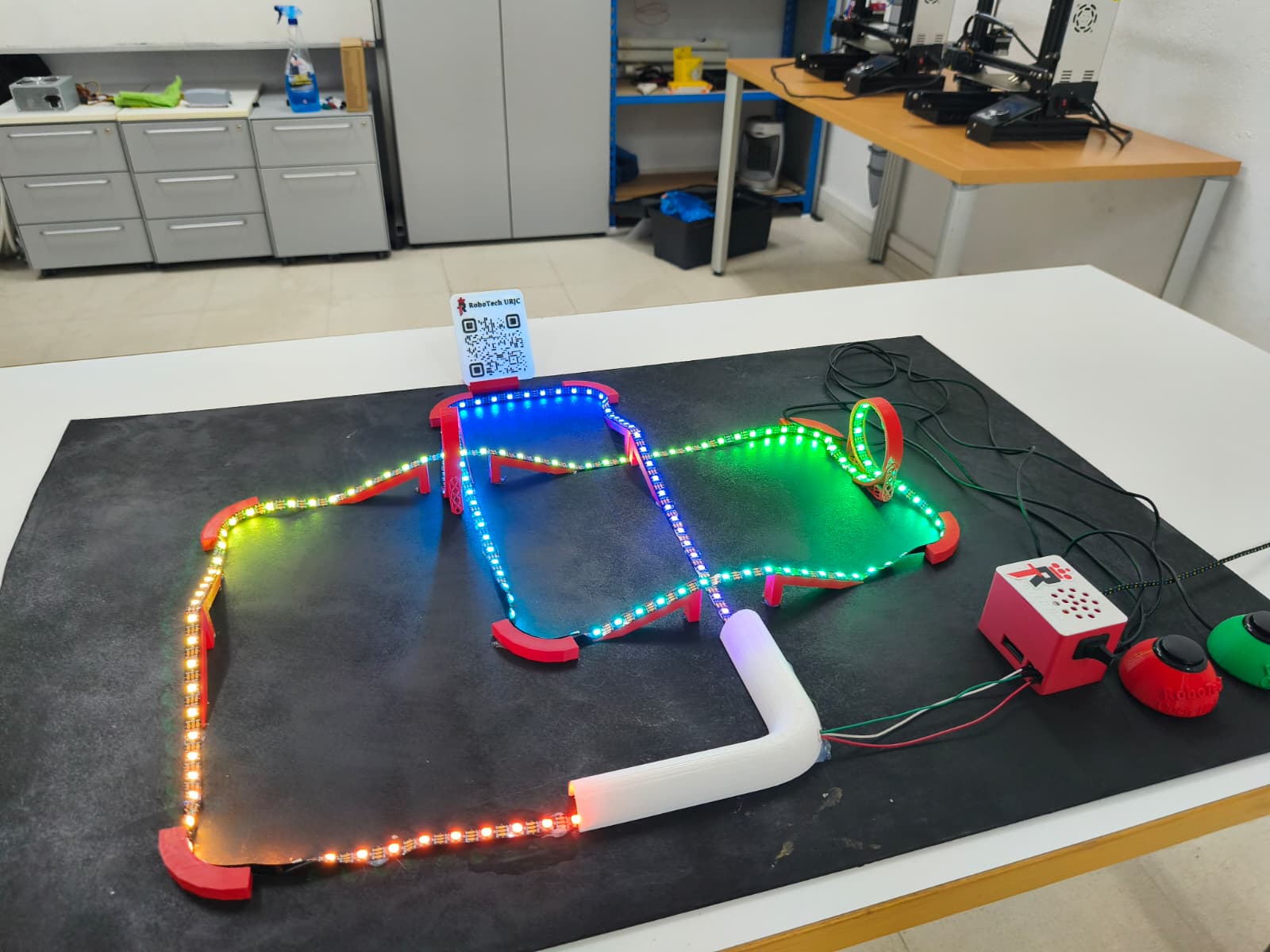
Futbolín interactivo con iluminación LED, detección de goles, marcador digital, relanzamiento automático y futuras funciones de visión artificial.
Juego competitivo con tiras NeoPixel y pulsadores para practicar soldadura, firmware y montaje.

Exploración de locomoción y diseño mecánico inspirado en insectos para estudiar movimiento y control.

Flota de robots impresos en 3D y programados en ROS, pensada para comunicarse entre unidades y realizar varias misiones.

Servidor de red para alojar y probar proyectos en la nube. El proyecto se conserva como referencia aunque ya no está en servicio.

Proyecto histórico de Robotech conservado en el archivo de la asociación.
Detalle de proyectos
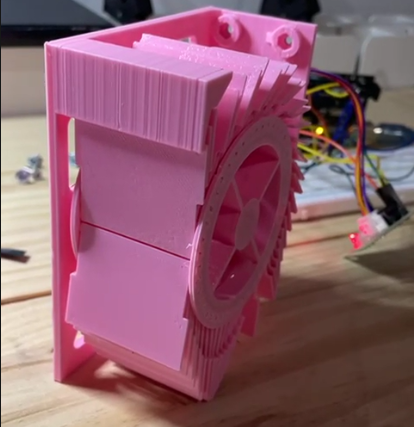
Robótica
El SCARA es un brazo robótico pensado para aprender cinemática, control de actuadores y automatización mediante un prototipo físico que pueda repetir trayectorias con precisión.
Construir una plataforma estable para manipular piezas ligeras, probar rutinas de movimiento y documentar el proceso mecánico, electrónico y de software.


Humanoide
Zeus parte de la filosofía open-source de InMoov para trabajar manos, antebrazos y percepción visual. Es un proyecto amplio, ideal para dividir tareas entre mecanica, electrónica y software.
Desarrollar módulos humanoides imprimibles, controlados con Arduino y capaces de integrarse con visión artificial en Python y OpenCV.
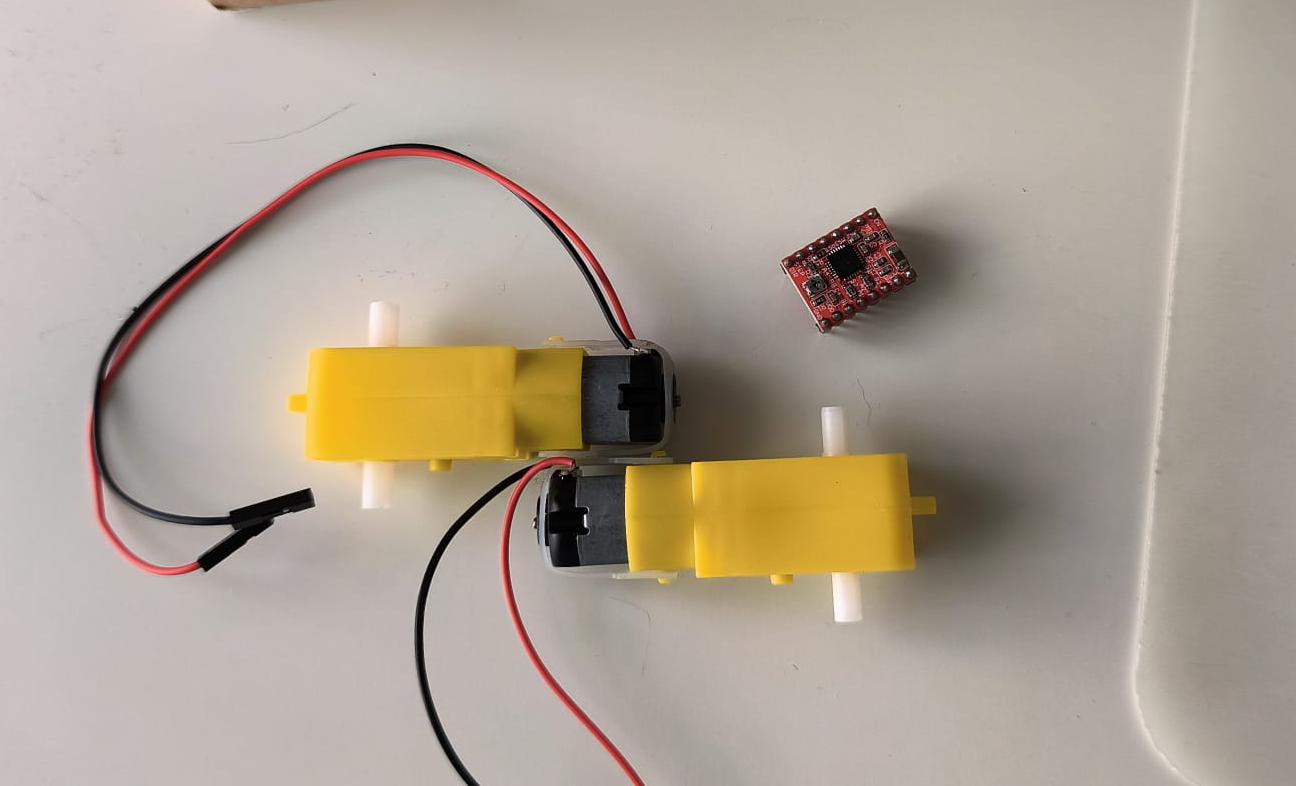
Educativo
HiroBot es un robot tipo tanque orientado a aprendizaje. Sirve para entrar en robótica desde tareas concretas: sensores, motores, servos, librería Arduino y documentación para nuevos miembros.
Crear una plataforma didáctica robusta que permita probar fundamentos de movimiento, lectura de sensores y control desde código sencillo.

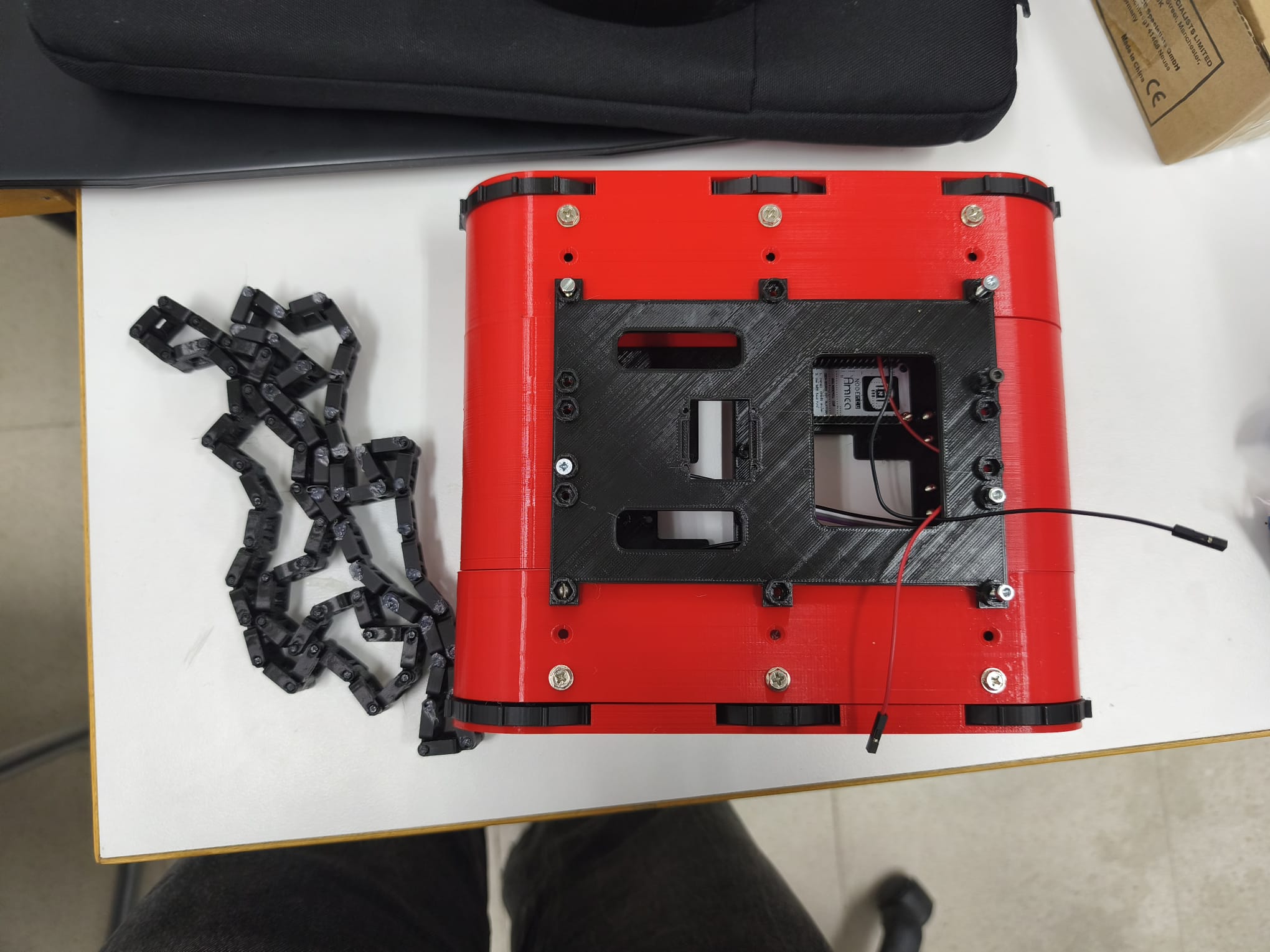

Hexápodo
Hexabot es la evolución técnica del proyecto Hormiga. Parte de una base ya terminada y la actualiza con un frame hexagonal, piezas rediseñadas, electrónica renovada y control por cinemática inversa.
Convertir la antigua araña robótica en una plataforma hexápoda más modular, cómoda de manejar y preparada para crecer hacia percepción y autonomía.
Frame hexápodo tomado como referencia desde Printables. Autor: Tom Knox.
Electrónica
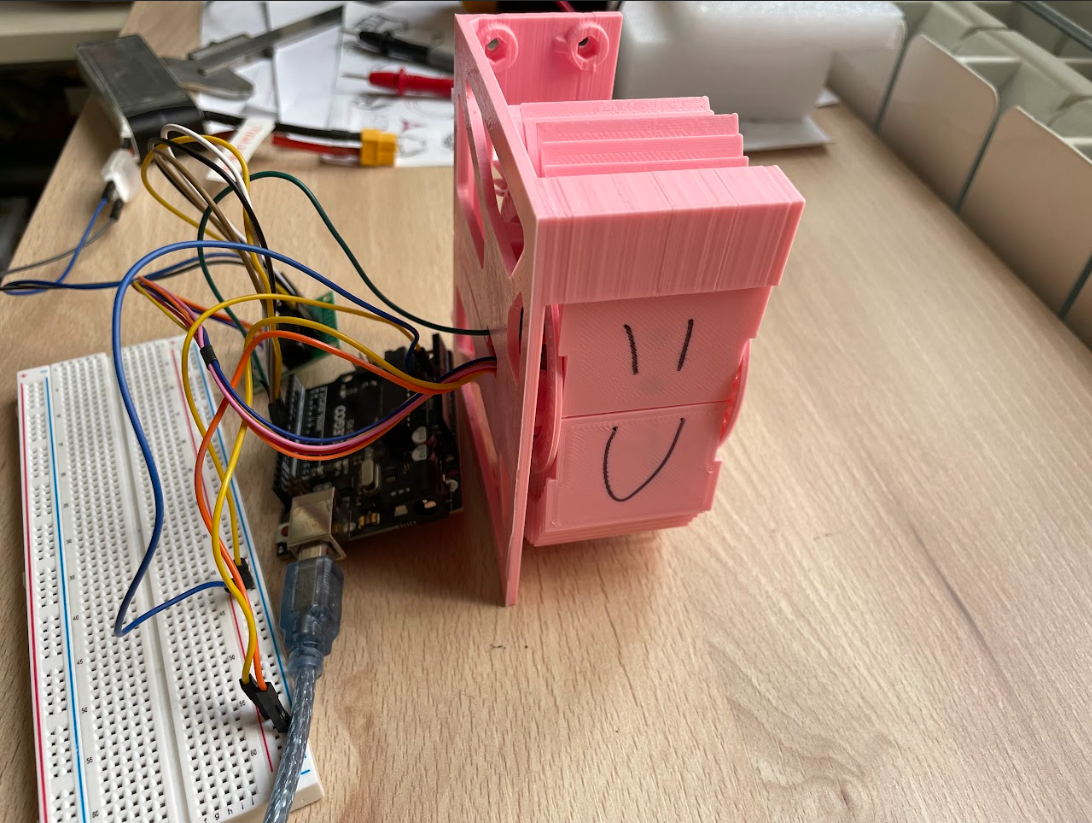
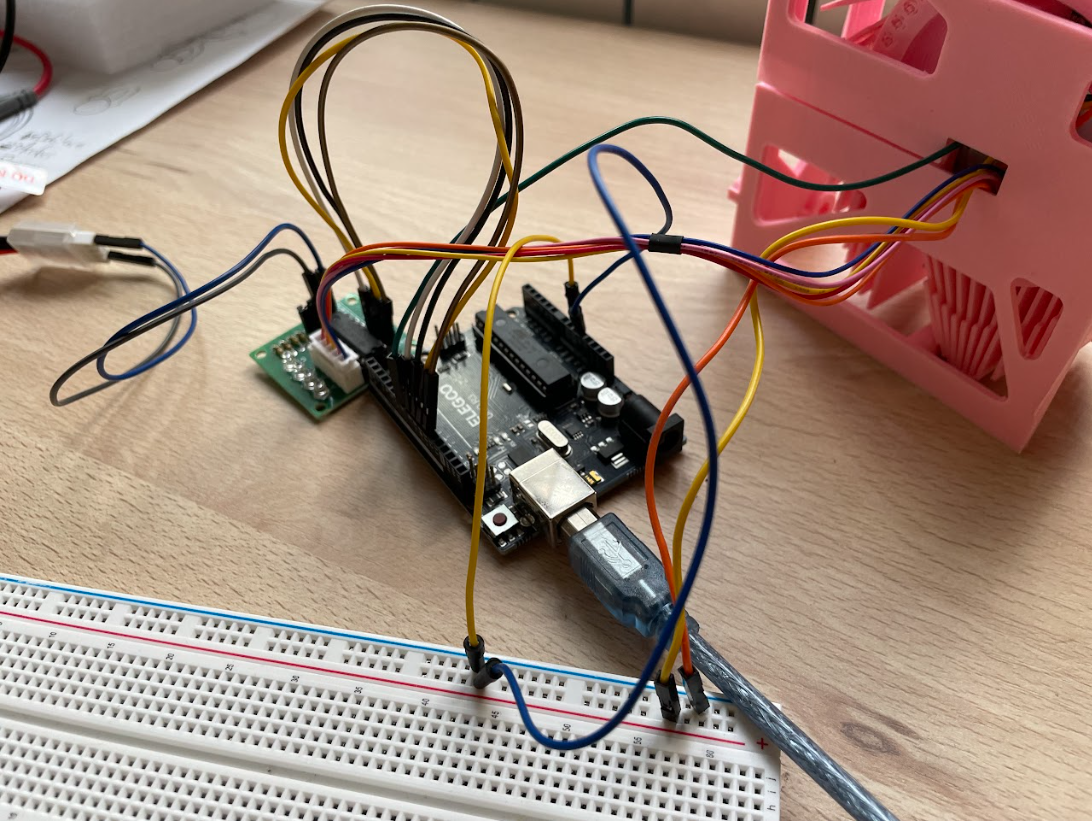
Juego electrónico para aprender lógica digital con una mecanica accesible. Permite trabajar componentes, montaje, programación y explicacion pedagógica del circuito.
Convertir conceptos de electrónica digital en una pieza jugable, documentada y reútilizable en talleres introductorios.

Autonomía
Plataforma RC modular para aprender integración de hardware, pruebas de vuelo y misiones programadas. El foco está en avanzar por etapas sin comprometer seguridad ni trazabilidad.
Pasar de control manual a una arquitectura capaz de integrar Raspberry Pi, sensores y rutinas autónomás controladas.




Interactividad
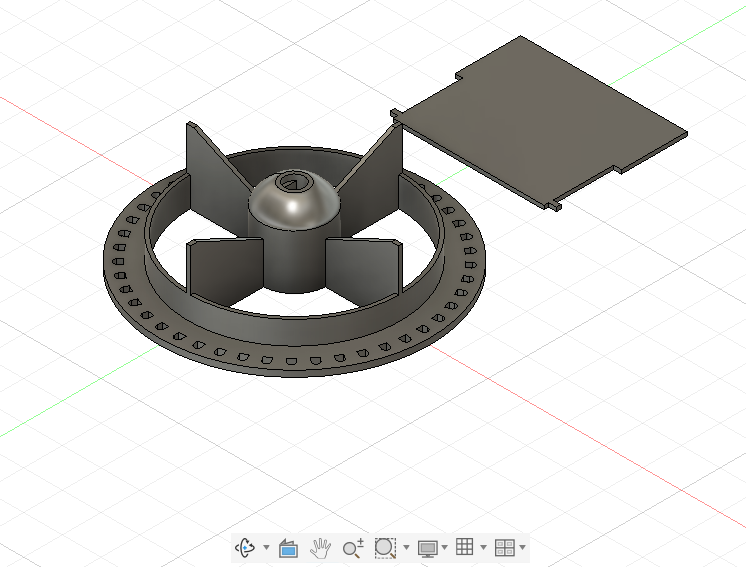
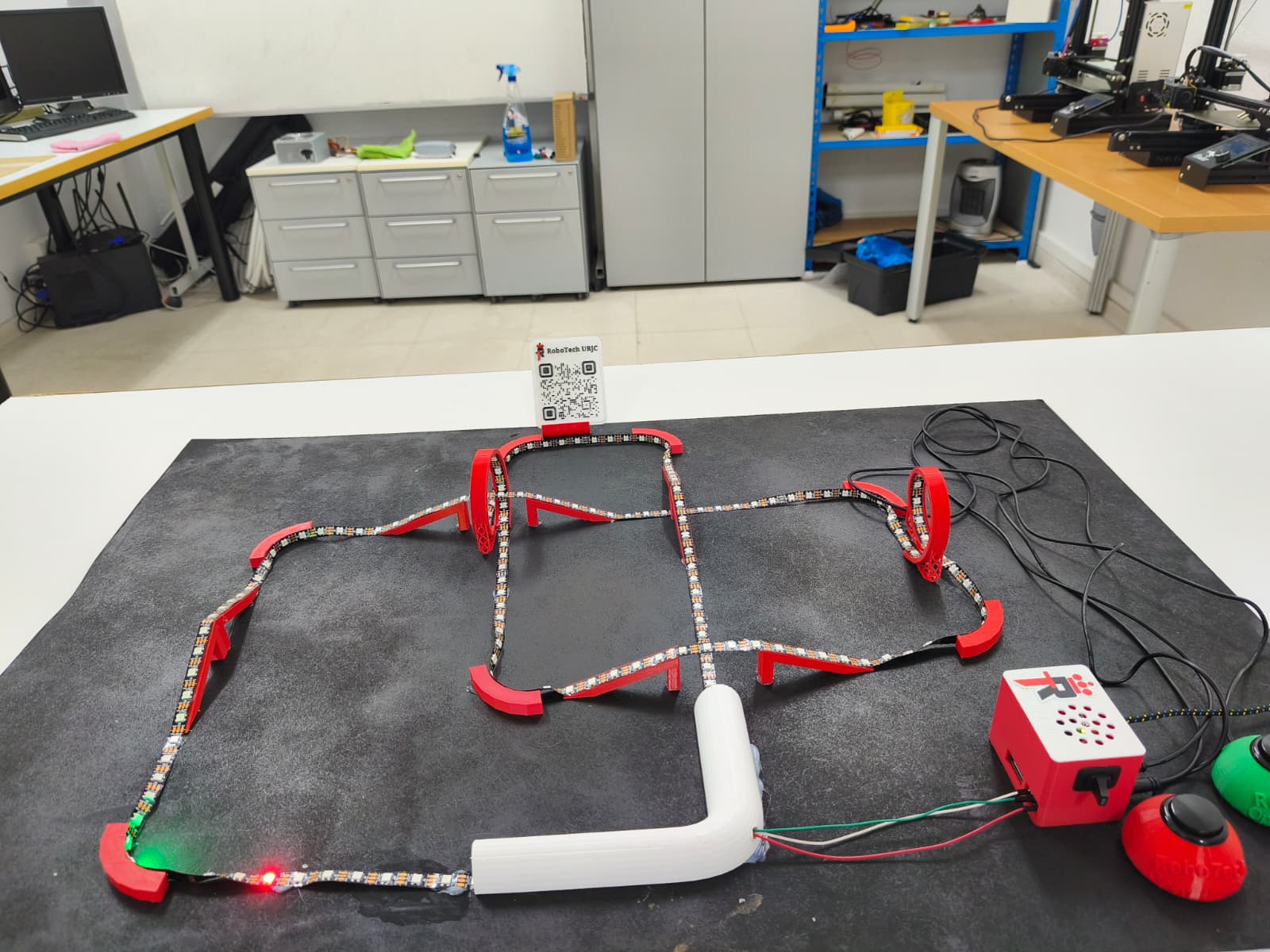
El Futbolín Automatizado convierte un futbolín tradicional en una plataforma interactiva con electrónica, control distribuido, neumática y futuras capacidades de visión artificial.
Construir una demo técnica atractiva para eventos, capaz de mostrar iluminación reactiva, detección automática de goles, marcador digital y automatización progresiva del juego.


Imágenes generadas como referencia visual de las fases del proyecto. No representan el modelo real construido; muestran el aspecto objetivo del Futbolín Automatizado.
Electrónica
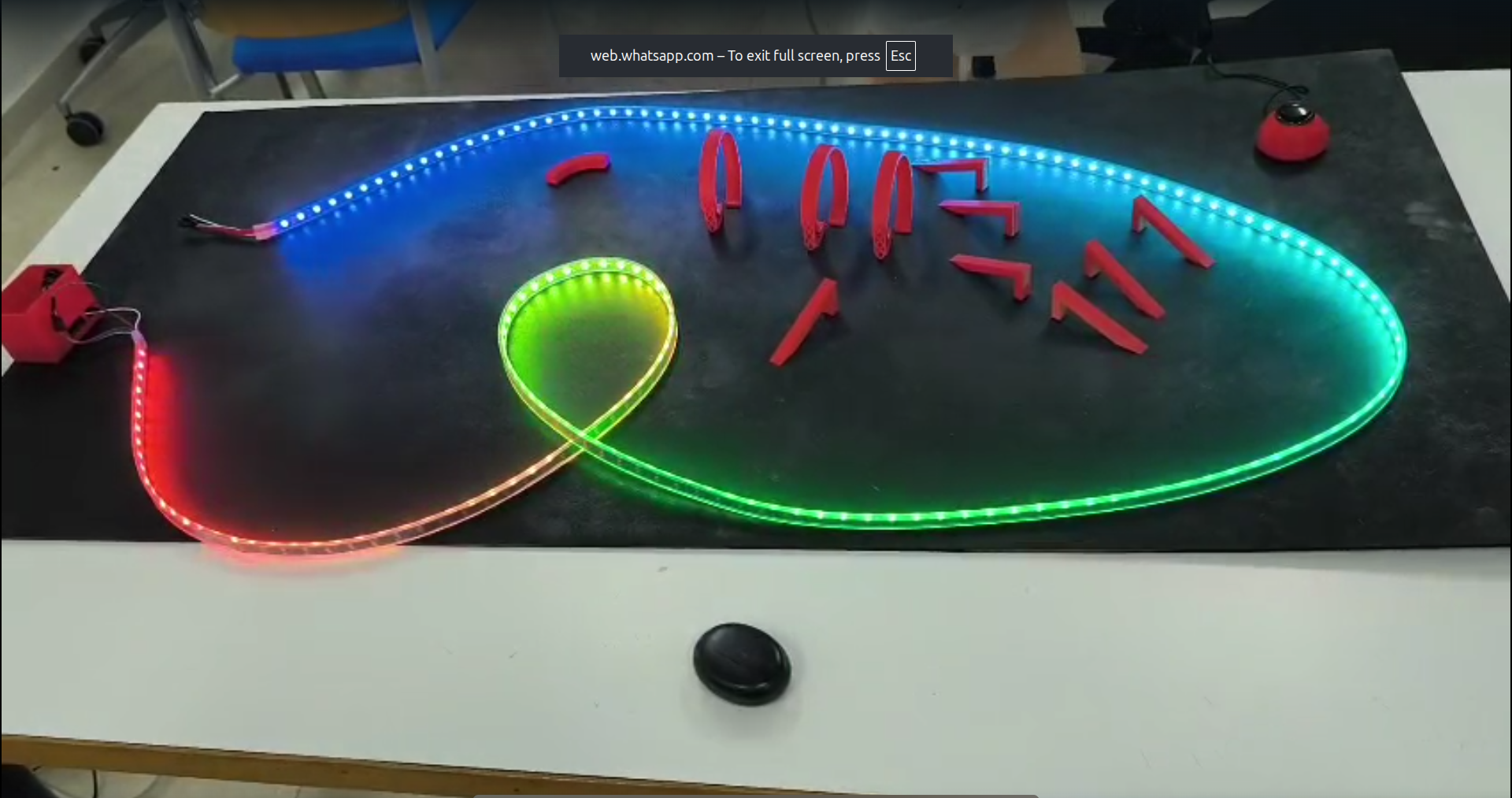
Juego competitivo con tiras NeoPixel y pulsadores. Es un proyecto perfecto para practicar soldadura, firmware, montaje limpio y diseño de una experiencia interactiva para eventos.
Construir un juego fiable, fácil de transportar y preparado para demostraciones, talleres o competiciones rápidas entre participantes.


Biomecánica
Proyecto de locomoción inspirado en insectos. Combina diseño mecánico, prototipado e iteracion de movimientos para entender como coordinar patas, estabilidad y control.
Construir un robot caminante experimental y usarlo como banco de pruebas para mecanismos, marchas y control de locomoción.
ROS
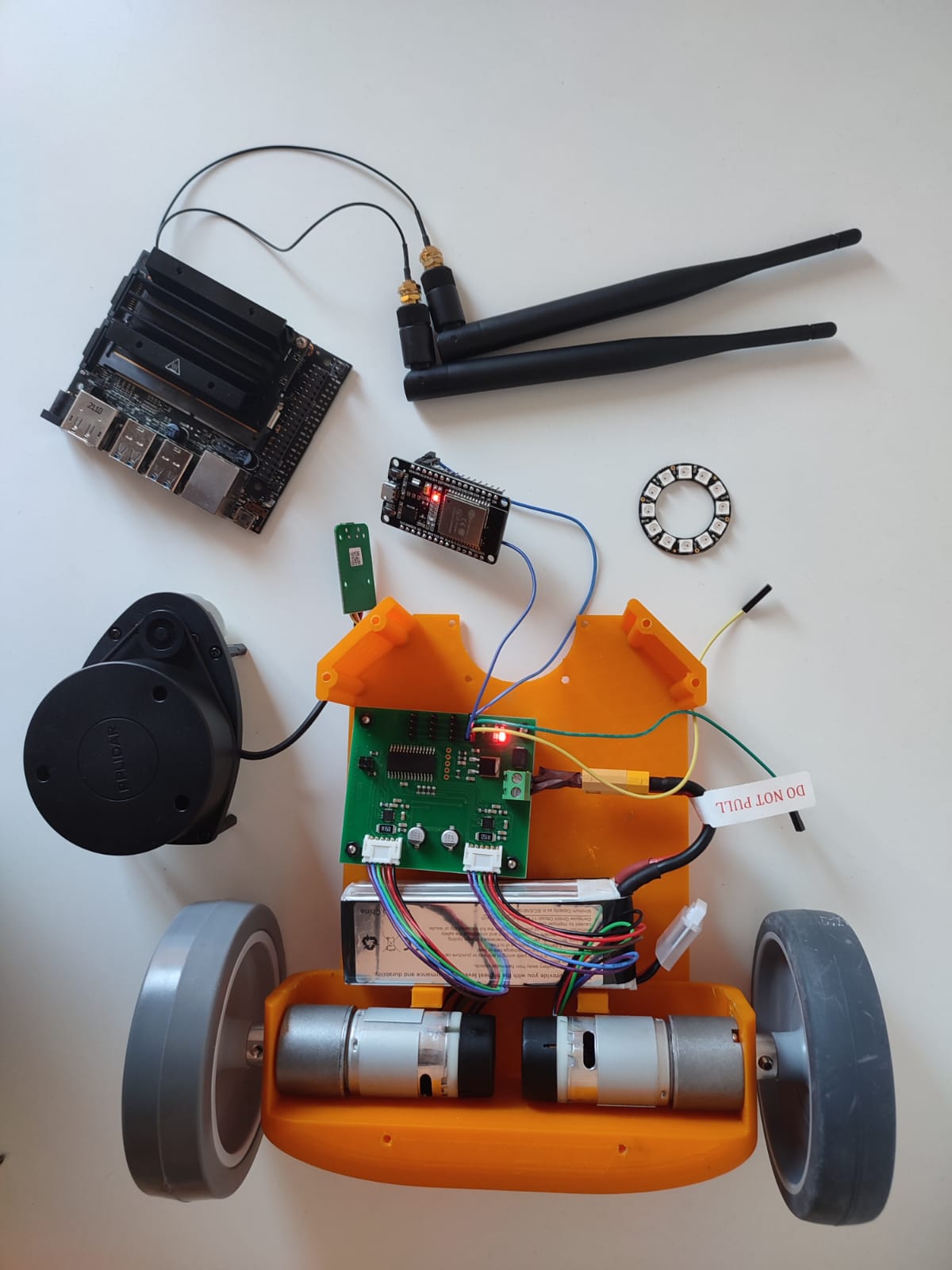
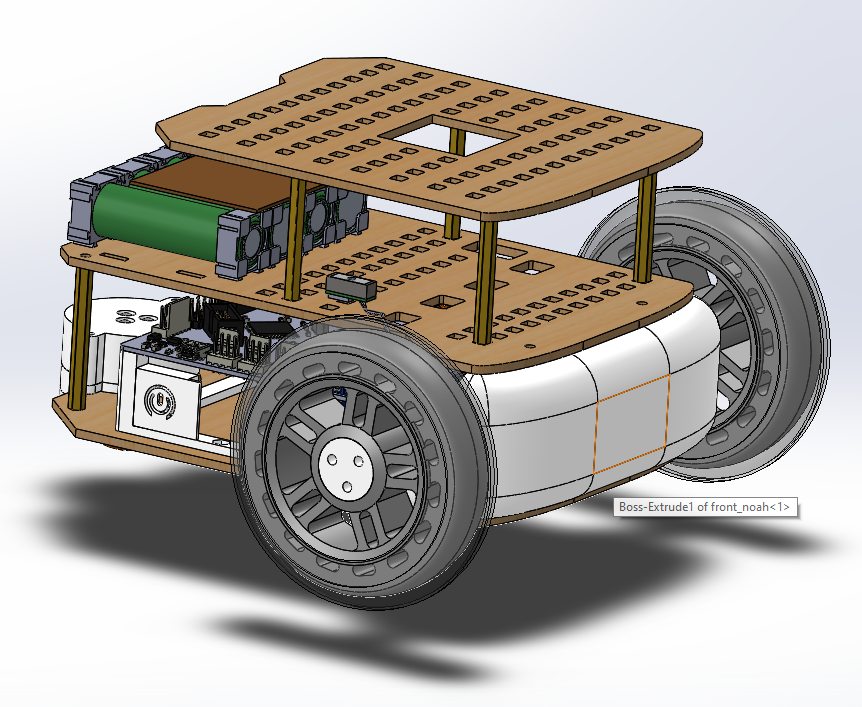
Noah fue una flota de robots impresos en 3D y programados con ROS. Se conserva como referencia para equipos que quieran estudiar robots móviles, comunicación entre unidades y arquitectura distribuida.
El proyecto sirve para revisar decisiones de hardware, estructura de repositorios, documentación y limites prácticos de una flota pequeña.

Infraestructura
Proyecto de infraestructura para alojar, probar y mantener servicios vinculados a la asociación. Aunque ya no está en servicio, deja aprendizajes útiles sobre despliegue y mantenimiento.
Ayuda a entender requisitos de red, copias de seguridad, permisos, servicios internos y documentación de administración.
Histórico
Oasis forma parte del archivo histórico de Robotech. Su funcion dentro de la web es conservar contexto, imágenes y memoria técnica para que las nuevas generaciones no empiecen siempre desde cero.
Recoger que se intento construir, que materiales se usaron y que decisiones deberian revisarse si alguien quiere reactivarlo.
Proponer proyecto
Define objetivo, materiales, riesgos y primer prototipo. El equipo puede ayudarte a aterrizarlo.